
![]()
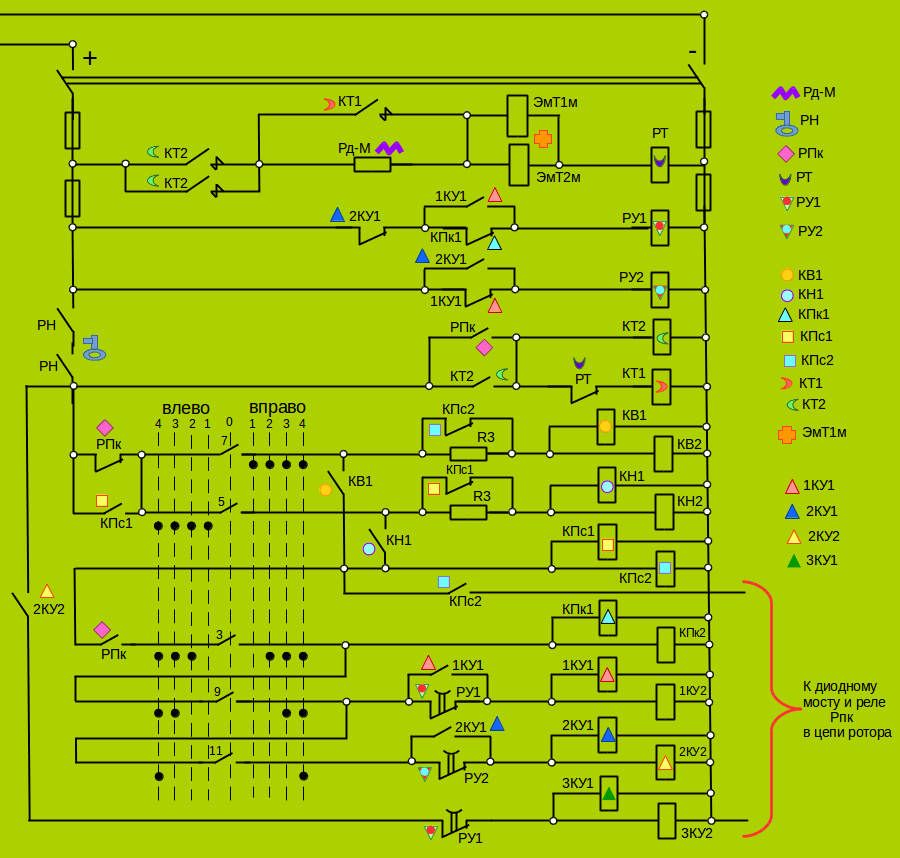
Скачать скан электросхемы основных механизмов крана (подъёма, передвижения крана и телеги, поворота), по которой сделана эта работа, можно отсюда (700 килобайт).
Благодарен всем, чьи картинки использовал.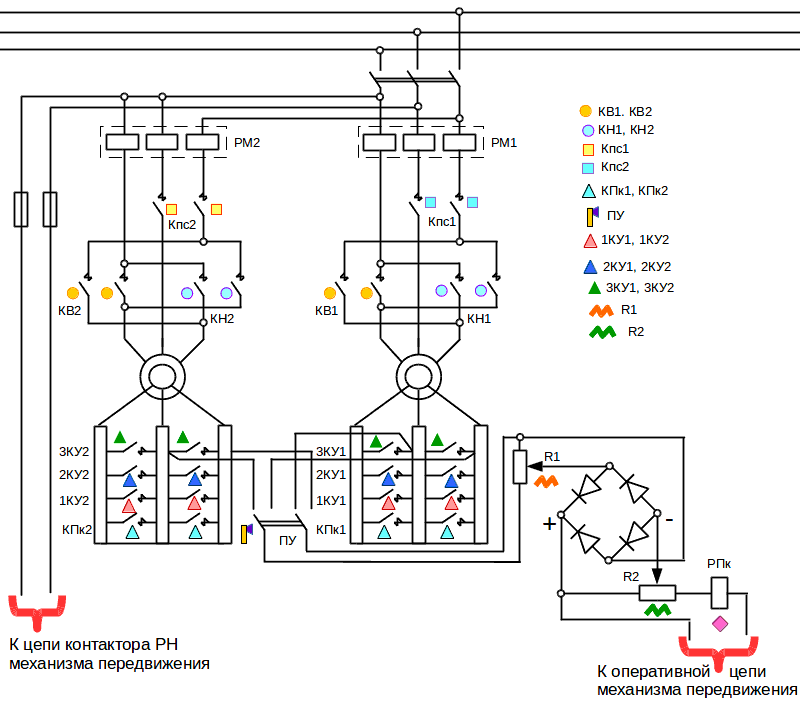
Совет. Схема выше большая. Прокручивать страницу от описания к схеме неудобно. Если вы читаете эту страницу в персональном компьютере, откройте изображение схемы в отдельной вкладке (курсор на изображении и правой клавишей мыши). А если вас раздражает белый фон, откройте это же изображение, но с зелёным фоном.
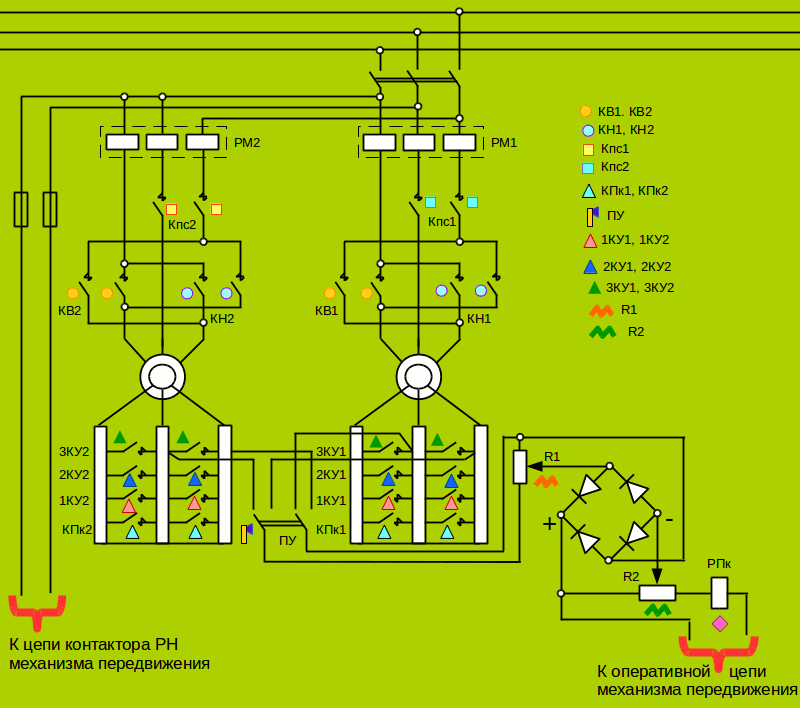
Двигателей передвижения (мы их называли двигателями моста) на кране, который мы разбираем, два. Каждый из них включается своими контакторами. Обратите внимание, что на каждый из двигателей приходится три силовых контактора, а не четыре, как в схеме подъёма. Это связано с тем, что здесь не требуется такой специфический режим работы, как торможение на двух фазах. Для реверсирования же двигателей достаточно трёх контакторов. И данная схема подключения двигателей, и та, по которой включается двигатель подъёма хороши тем, что, если выйдет из строя (отключтится, не включится) один контактор, на двигатель будет поступать только одна фаза, а не две. Поэтому двигатель не будет работать, но не выйдет из строя.
Контактров ускорения, закорачивающих сопротивления цепи ротора двигателя здесь четыре, а не пять, как у двигателя подъёма. Цепь с диодным мостом мы разберём ниже.
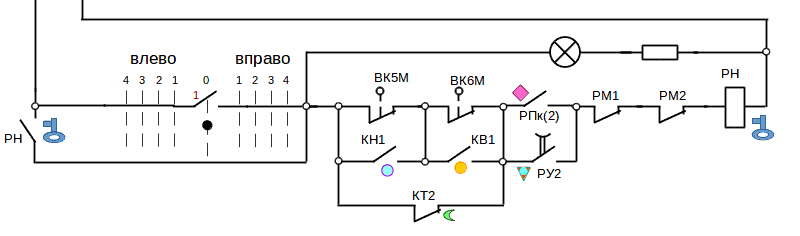
Что достойно разъяснения в данной схеме? Обратите внимание на два контакта конечных выключателей ВК5М и ВК6М. Эти конечники, расположенные на мосту, срабатывают и останавливают кран, если он слишком близко приблизится к границе рельсового пути или к соседнему крану. Однако, если какой либо из этих выключателей сработал, крановщик должен не иметь возможности двигаться дальше, но иметь возможность отъехать в обратную сторону. Такая возможность обеспечивается подключенными параллельно конечникам блок-контактам (дополнительным, не силовым контактам) силовых контакторов Кн1 и КВ1, а также нормально замкнутым контактом контактора цепи растормаживающего магнита КТ2. Допустим, включен контактор КВ1, и кран едет вправо. Контактор КТ2 включен. Это контактор, подающий питание на растормаживающие магниты, а они при движении крана должны работать, поэтому контакт КТ2 разомкнут. Кран наезжает на упор, срабатывает конечник ВК5М. Контактор РН выключается, оперативная цепь обесточивается, все контакторы и реле механизма подъёма выключаются. Выключается и КТ2. Контакт КТ2 замыкается. Крановщик ставит контроллер на ноль, РН снова включается и встаёт на самоподхват (РУ2 должно быть замкнуто, пусть вас это не смущает, РПк мы позже разберём). Теперь если крановщик попытается снова поехать вправо, включится контактор КВ1, при срабатывании контактора цепи магнита КТ2 его нормально замкнутый контакт разомкнётся и, поскольку контакт конечника ВК5М разомкнут, цепь РН снова разорвётся. Однако если крановщик поедет влево, питание на катушку РН пойдёт в обход ВК5М через КН1 - ВК6М.
Хочу обратить внимание ещё на один момент. В электросхеме данного крана на каждый из контроллеров поступает два вида напряжения: переменное (цепь контактора РН) и постоянное. В других же кранах. которые мне встречались, цепь контактора РН тоже работала на постоянном токе.
Совет. Прокручивать страницу от описания к схеме неудобно. Если вы читаете эту страницу в персональном компьютере, откройте изображение схемы в отдельной вкладке (курсор на изображении и правой клавишей мыши). А если вас раздражает белый фон, откройте это же изображение, но с зелёным фоном.
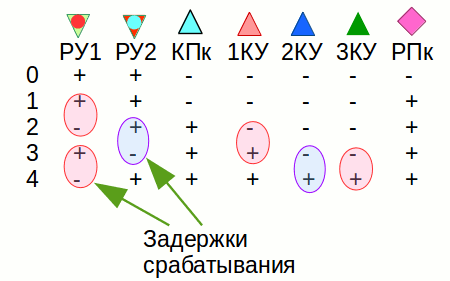
Оперативная цепь механизма передвижения во многом похожа на таковую подъёма. Непринципиальные отличия я не буду здесь описывать. Однако одно существенное отличие достойно подробного объяснения. На схеме силовой цепи имеется диодный мост, на вход которого подаётся напряжение, генерируемое в обмотке ротора одного из двигателей, причём какого именно, определяет положение переключающего рубильника ПУ. Выходящие же провода диодного моста идут к оперативной цепи, причём один из них через катушку реле РПк. В чём функция этого реле? В кране используются асинхронные двигатели с фазным ротором. Что значит "асинхронные"? Это значит, что скорость вращения ротора не совпадает со скоростью "вращения" магнитного поля. Чем больше разница между этими скоростями, тем больше ток в обмотках статора и ротора. Например, в первые моменты после запуска двигателя, когда ротор ещё не успел раскрутиться, ток в обмотках большой (его ещё называют пусковым током). Когда ротор набирает скорость, ток уменьшается. В описании механизма подъёма было рассказано о торможении противовключением, когда ротор двигателя вращается в одну сторону, а магнитное поле статора в другую. Однако при этом возникает большая разница между скоростями поля статора и ротора. К тому же крановщик может при этом вывести рычаг контроллера в крайнее положение, когда сопротивления, уменьшающие ток в обмотке ротора закорочены. В результате ток в обмотках статора и ротора возрастёт чрезвычайно, что может привести к выходу двигателя из строя. Для избежания таких ситуаций предусмотрена соответствующая защита. Рассмотрим её подробнее. Напряжение, генерируемое в обмотке ротора одного из двигателей (какого именно, определяет положение переключателя ПУ) выпрямляется диодным мостом. Напряжение, поступающее на вход диодного моста, и напряжение, снимаемое на выходе регулируются сопротивлениями R1 и R2.
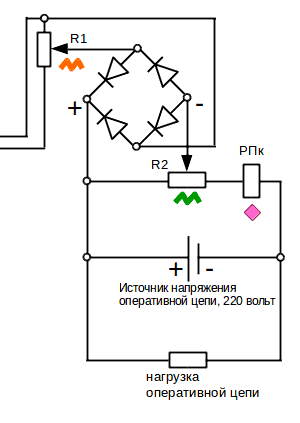
При работающих двигателях выход диодного моста оказывается подключен последовательно с источником постоянного напряжения в оперативной цепи, причём эти два источника соединены "встречно". Приведу метафору. Представьте, что два человека в лодке гребут в противоположные стороны. Или вот ещё метафора. Представьте, что батарейки соединены последовательно, но не как обычно ("плюс" с "минусом"), а "плюс" с "плюсом". Результирующее напряжение в цепи и направление и величина тока в ней будут определяться разностью между составляющими напряжениями. Напряжение в оперативной цепи составляет 220 вольт и не меняется. Напряжение на выходе диодного моста меньше и зависит от напряжения в обмотке ротора. Чем больше напряжение в обмотке ротора, тем меньше результирующее напряжение. От этого напряжения питается катушка реле максимального тока РПк. Когда результирующее напряжение уменьшится до определённого значения, реле РПк отключится.
Пояснение к двум рисункам ниже я сделал в двух формах: в виде рисунка с текстом, с необходимостью прокрутки, и собственно в виде текста. Пользуйтесь той формой, которую находите более удобной.
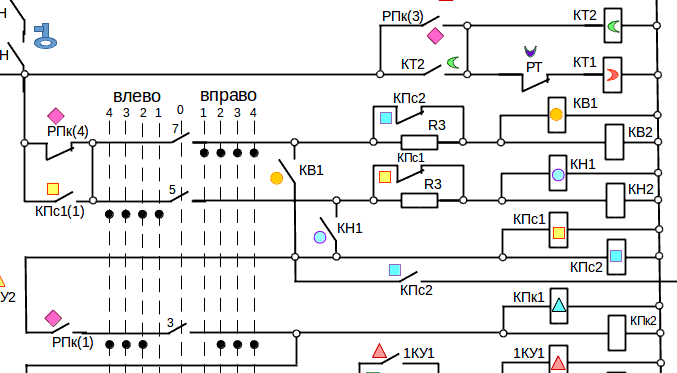
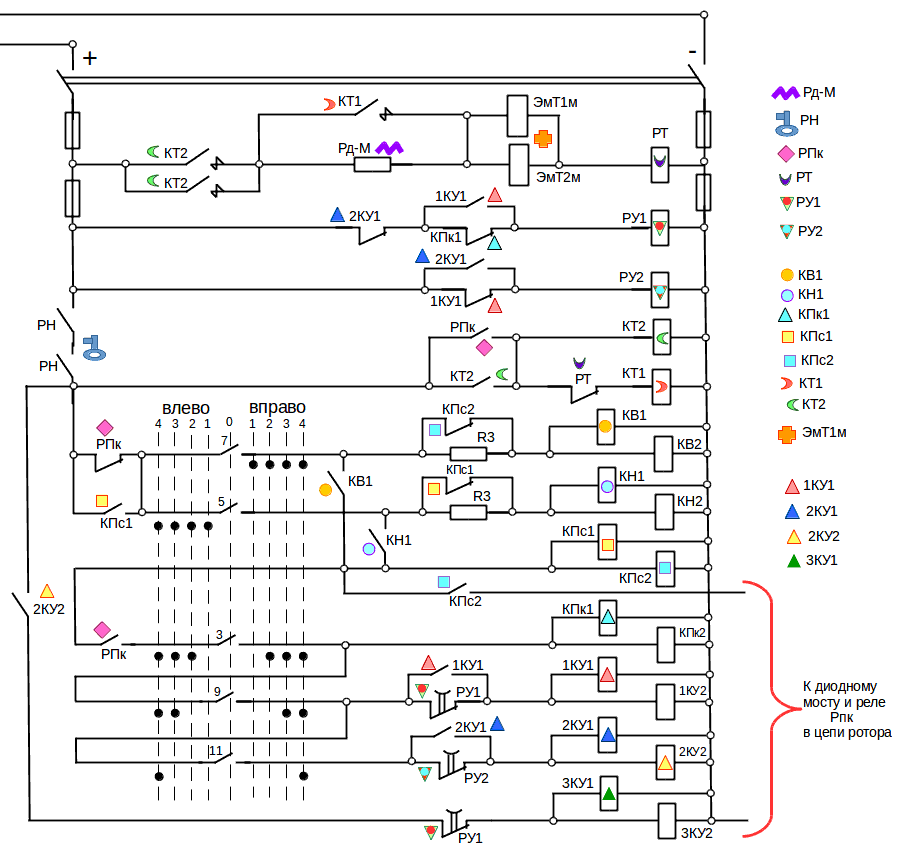
Рассмотрим теперь подробнее контакты реле РПк и что происходит при его включении и отключении. Таковых контактов всего четыре. РПк(1) отключает подачу питания на катушки контакторов ускорения КПк1, КПк2, 1КУ1, 1КУ2, 2КУ1, 2КУ2, 3КУ1, 3КУ2. РПк(2) обеспечивает работу контактора РН в те моменты, когда отключается реле РУ2. Через РПк(3) включаются растормаживающие магниты. РПк(4) обеспечивает включение силовых контакторов КВ1 и КВ2, КН1 и КН2, КПс1 и КПс2.
Когда кран стоит, напряжения в цепи ротора двигателей передвижения нет, от оперативной цепи напряжение к реле РПк также не поступает, поскольку выключено КПс2. Реле РПк выключено. Крановщик решает поехать и выводит рычаг, допустим, в первое положение вправо. Через нормально замкнутый контакт РПк(4) включаются КВ1 и КВ2, затем КПс1 и КПс2. В цепи ротора появляется напряжение, реле РПк включается, РПк(4) размыкается, но двигатели остаются включёнными, поскольку в этот момент уже замкнуто КПс1 (1). Через РПк(3) включаются растормаживающие магниты и КТ2 встаёт на самоподхват. Замыкается РПк(1), что обеспечивает возможность включения контакторов ускорения в последующих режимах.
Допустим, крановщик перешёл в 4 режим вправо и вдруг решает резко затормозить и выводит рычаг в 4 режим влево. Отключается реле РПк. В этот момент отключатся только контакторы ускорения, потому что они питаются через РПк(1). И магнит, и силовые контакторы продожат работать, потому что РПк(3) и РПк(4) зашунтированы, к тому же РПк(4) при отключении замкнётся. То есть торможение противовключением продолжит иметь место, но оно будет менее интенсивным. Когда кран затормозится, реле РПк снова включится, и кран сможет продолжить нормальную работу.
Отмечу ещё одну особенность схемы оперативной цепи. Катушки силовых контакторов КВ1, КВ2, КН1, КН2 включаются через нормально замкнутые контакты КПс2, затем, при включении КПс2 эти контакты размыкаются, и питание их идёт через сопротивления R3. Думаю. это сделано затем. чтобы ограничить ток через реле РПк.
В схеме данного крана для растормаживания двигателей моста используются электромагниты. Однако во многих других кранах растормаживание двигателей моста устроено гораздо проще - параллельно двигателю подключён гидротолкатель, отжимающий тормозные колодки, пока включен двигатель. И нигде я не встречал магнитов на телеге и повороте, а только гидротолкатели.
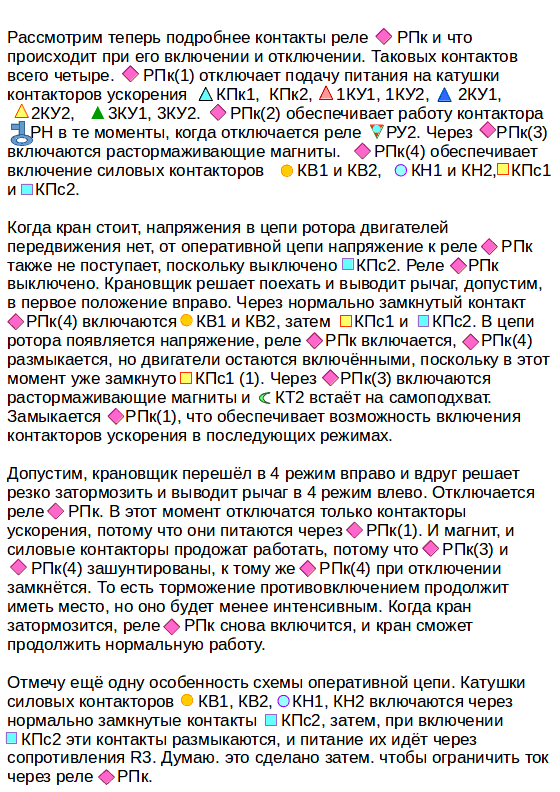
Я решил не описывать в деталях взаимодействие контакторов ускорения и реле, обеспечивающих их работу. Вместо этого я составил таблицу, в которой показано, включен или выключен тот или иной контактор или реле в том или ином режиме передвижения. Эллипсами показаны задержки срабатывания (включения или выключения) при переходе в следующий (больший) режим (например, со второго на третий, или с третьего на четвёртый). При переходе в меньший режим отключение контакторов ускорения производится размыканием соответствующих контактов в контроллере без задержек.
Подробное описание электорсхемы механизмов передвижения телеги и поворота находящейся на ней поворотной платформы я решил не делать. Они устороены аналогично электосхеме механизма передвижения. Если кто хочет ознакомиться с ними, он может скачать скан электросхемы крана отсюда (700 килобайт).
Хочу лишь осветить один момент. В схеме, по которой я делал эту работу, скорость телеги и поворота регулируется так же, как и подъёма и моста - закорачиванием сопротивлений в цепи ротора. Однако на реальном кране так имело место быть в случае подъёма и моста, но не телеги и поворота. Вместо сопротивлений на телеге и повороте использовались пускорегулирующие дроссели. Мы называли их "реакторами". И это было так на подавляющем большинстве мостовых кранов, с которыми я имел дело: подъём и мост - сопротивления, телега и поворот - пускорегулирующие дроссели (реакторы). Краны были старые, и, судя по всему, раньше на них и на телеге и повороте тоже стояли сопротивления, а потом их заменили реакторами.
Что же собой представляет пускорегулирующий дроссель (реактор)? По внешнему виду (но не по сути) он очень похож на трансформатор. Это блок из трёх катушек с промежуточными выводами, надетых на каркас из трёх металлических труб. Подобно сопротивлениям, концы катушек соединены между собой в "звезду", а начала через щётки соединены с ротором электродвигателя. В зависимости от требуемой характеристики реактора, может быть использована только часть его обмоток. Тогда подключаются промежуточные выводы. Каков принцип действия реактора? Как известно, медь очень хороший проводник. Медная катушка обладает малым активным сопротивлением, которое зависит от проводимости и в процессе работы реактора не меняется, и большим индуктивным сопротивлением (его ещё называют реактивным сопротивлением, отсюда название "реактор"), величина которого зависит от частоты тока. В момент пуска двигателя в его статоре возникает "вращающееся" магнитное поле, которое навевает напряжение в обмотке ротора. Поскольку ротор в первый момент ещё неподвижен, частота тока, возникающего в обмотке ротора под влиянием этого напряжения, равна частоте тока в статоре. В этот момент индуктивное сопротивление реактора максимальное. По мере того, как ротор раскручивается, он начинает двигаться в ту же сторону, в какую "вращается" магнитное поле статора. Скорость "вращения" магнитного поля статора относительно ротора уменьшается. Уменьшается частота тока в роторе. Как следствие, уменьшается индуктивное сопротивление катушек реактора, Ток в обмотке ротора увеличивается. Скорость вращения двигателя возрастает. Поскольку контакторы ускорения при использовании дросселя отсутствуют (и в литературе их использование не упоминается, и мне они не встречались), крановщик регулирует скорость телеги и поворота, кратковременно включая двигатель, определяя продолжительность его включения. В чём преимущество реактора перед сопротивлениями? Перечислю недостатки регулирования скорости при помощи сопротивлений, которые устраняются при использовании пускорегулирующего дросселя:
Об ошибках сообщайте по электронной почте obuchmat@mail.ru
{kind=link}
{kind=link}